Dhruv is a Robotics Graduate student at Worcester Polytechnic Institute. He's been working as a student
researcher in Robotics for 5 years and has worked on various aspects of Robotics through the years. He is
skilled in robot kinematics, planning and control, firmware and embedded software, IoT, Learning
techniques, and the Robot Operating System (ROS). His ambition is to apply his skills to develop
innovative solutions and help integrate technology in healthcare. He currently works as a Advanced
Robotics Co-op at Amazon Robotics and as a Graduate Researcher at the Automation and Interventional
Medicine (AIM) Lab.
MRI Robot and Stereotactic Surgeries (Thesis)
Automating the workflow of the WPI-MRI Robot. Identifying burr holes and generating surface meshes in-situ MRI scanning. Motion planning and collision avoidance of critical arteries and brain tissue to mitigate adverse risks of brain surgeries.
Human Intent Detection
Runner's up in the MRADI Real Time Sensor Fusion Challenge!
Improving the control design for the HOPE Hand Exoskeleton to assist patients suffering from Traumatic Brain Injuries and strokes with smoother extension and flexion of their hand. Designed a controller for the HOPE Hand Exoskeleton that intrinsically captures Human Intent using multimodal sensor fusion.
Collaborative Suturing using Reinforcement Learning
Come check our paper presentation at RO-MAN 2020!Performed an exploration of a discrete reinforcement learning-based approach to automate the needle hand-off task. Users were asked to perform a simple running suture using the da Vinci Research Kit. The user trajectory was learnt by generating a sparse reward function and deriving an optimal policy using Q-learning.
Human Intent Detection
Collaborative Suturing on the daVinci Research Kit
Research Engineer Intern
Signal Processing Algorithm Development
Designing real-time signal processing algorithms to process Electromyography Signals (EMG).
Real-Time Communications Middleware
Designed a real-time communications interface between Delsys Sensors and 3rd Party Sensors.
Courtesy of Delsys
Robotics Software Engineer Co-op
Sensor fusion for Mapping and Navigation
Integrating high fidelity mini lidars with our own novel SLAM based on a modified AMCL approach.
- Developed device level drivers for the sensors to interface with the high-level ROS stack.
- Designed a special Gazebo plugin to mimic the onboard sensor for simulations.
Fleet Management and Maintenance
Manage and maintain a fleet of 200+ Rosie's
- Device level firmware updates and bug fixes.
- Developing a validation and testing software platform for high-yield production.
- Containerized deployments for a fleet of robots.
Rosie is a fully autonomous industrial cleaning robot.



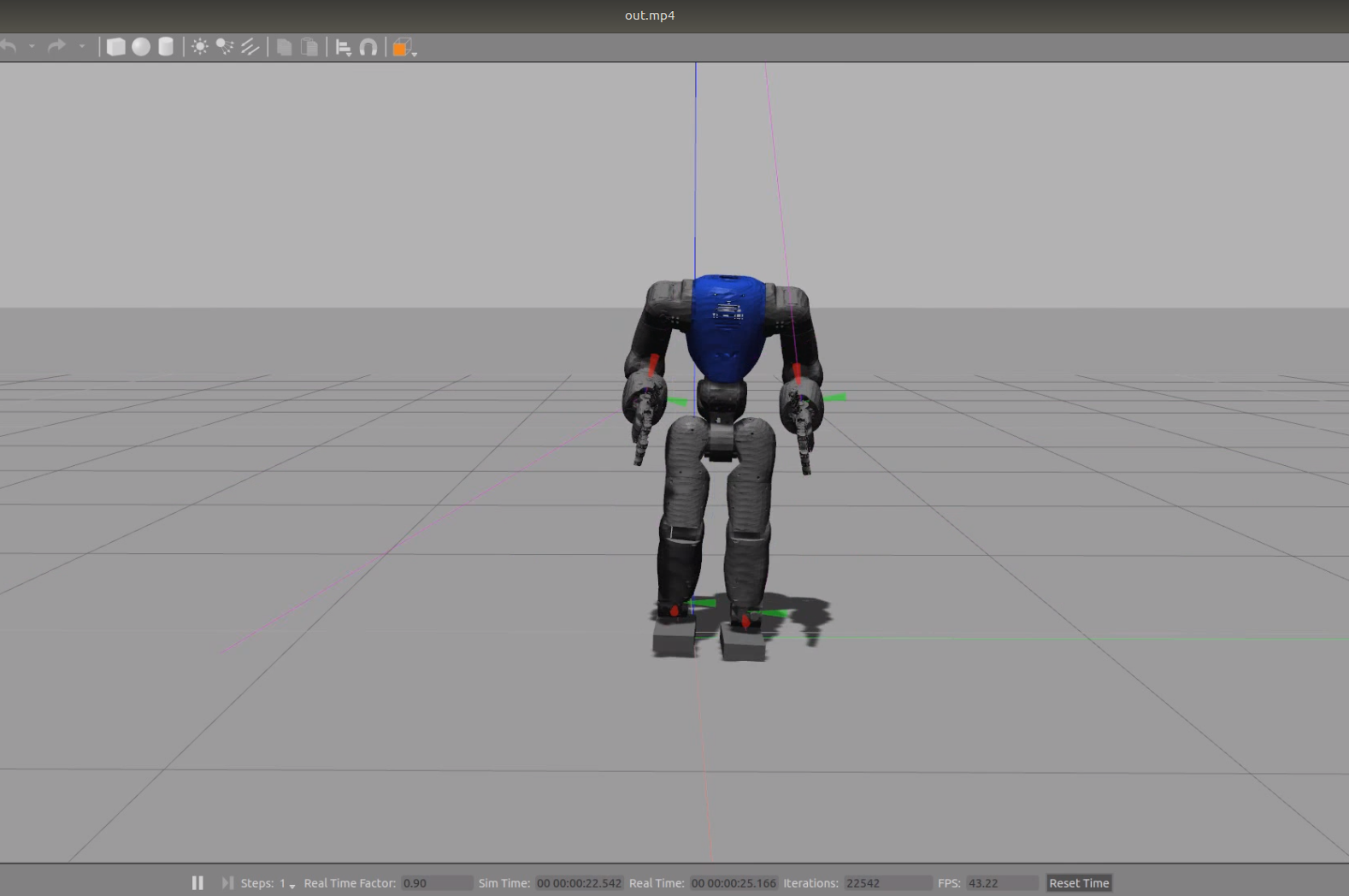
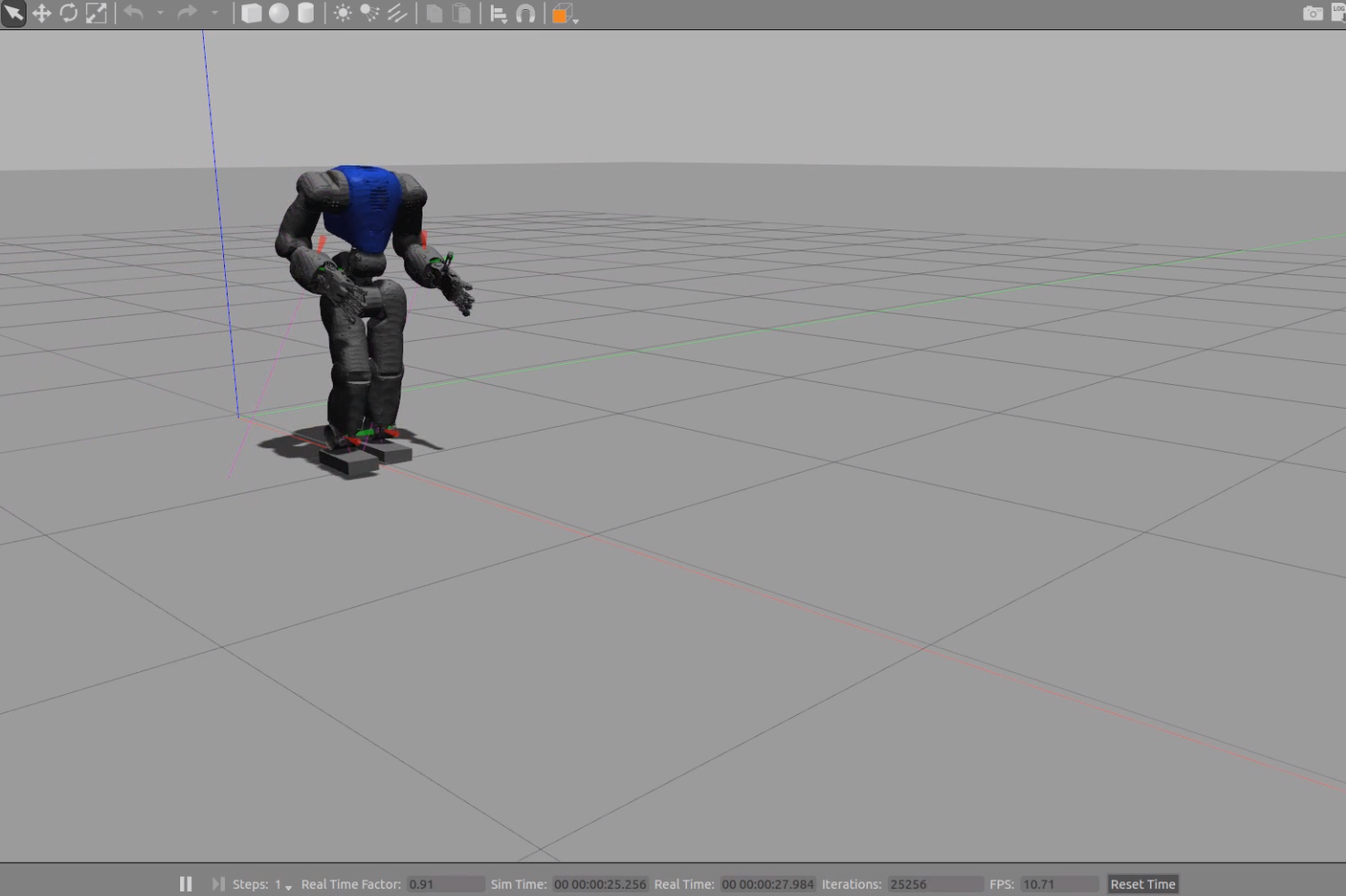
Humanoid Walking
Developed a package using OROCOS RTT and ROS frameworks for simulating experiments on walking and implemented a controller for stepping, walking and active balance for the COMAN Humanoid Robot.
Animal Locomotion
Developed a package using ROS along with appropriate analysis tools and controllers for simulating modular tetrapoda models with neuromechanical control algorithms.
A comparison between the simulation and experiment
Coman stepping in place
Walking
Teaching Positions
Robot Dynamics and Control (MTE-3003)
2018 - Present
- Teaching 40 Senior Underraduates Robot Dynamics through ROS.
- Evaluating final research project and assignments, prepared course curriculum.
CAD & Kinematics Lab (MTE-2211)
2016 - 2017
- Teaching 82 Sophomore and Junior Undergraduates 3D kinematic models on CATIA V6.
- Evaluating models, semester projects and assignments.

Best Rover team from Asia (2017)
We participate regularly at the University
Rover Challenge
Mechanical Engineer
Developed a Mars Rover prototype that flaunts a modified rocker-bogie suspension, low pressure balloon tires, custom designed scientific testing mechanism, 6-DOF Robotic Arm and can run autonomously for as long as an hour.
Robotic Arm Lead
Other than developing the entire Rover, I was in charge of designing a 6-DOF Robotic Arm that fit the competition criteria with added features such as a self-adapting parallel jawed gripper and a modular assembly (for easy replacement of parts).
The Rover during a demonstration for Cooler Masters